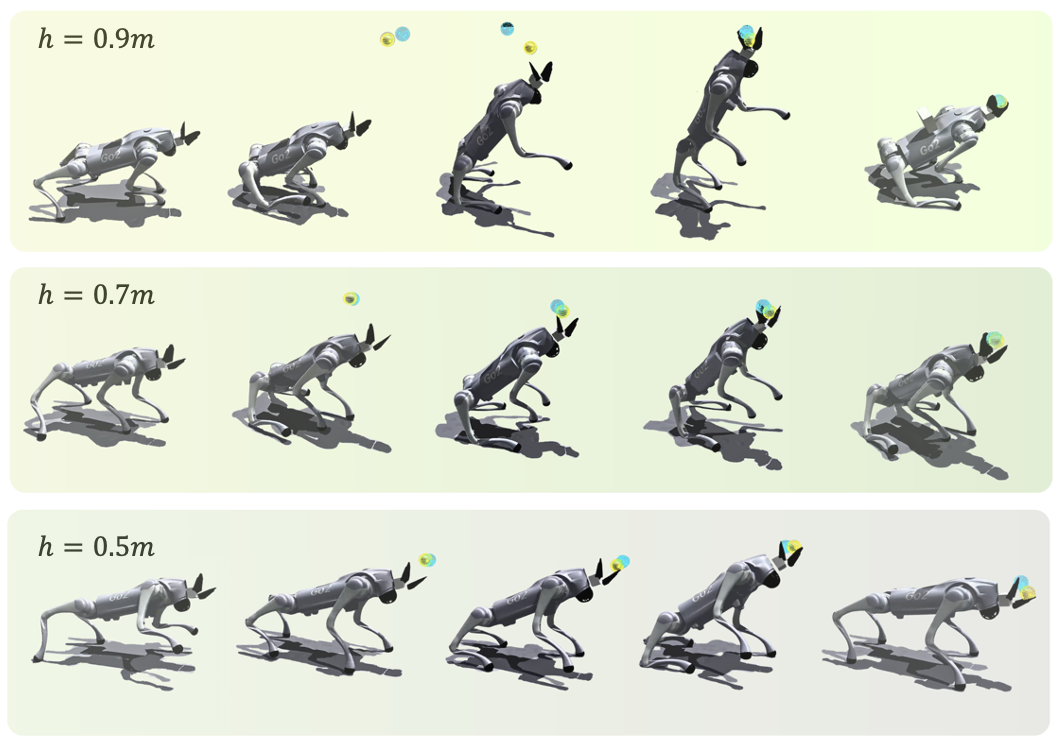
Our system is able to jump and successfully catch the ball at 1.05m high in simulation and 0.8m high in the real world, while the robot is 0.3m high when standing.
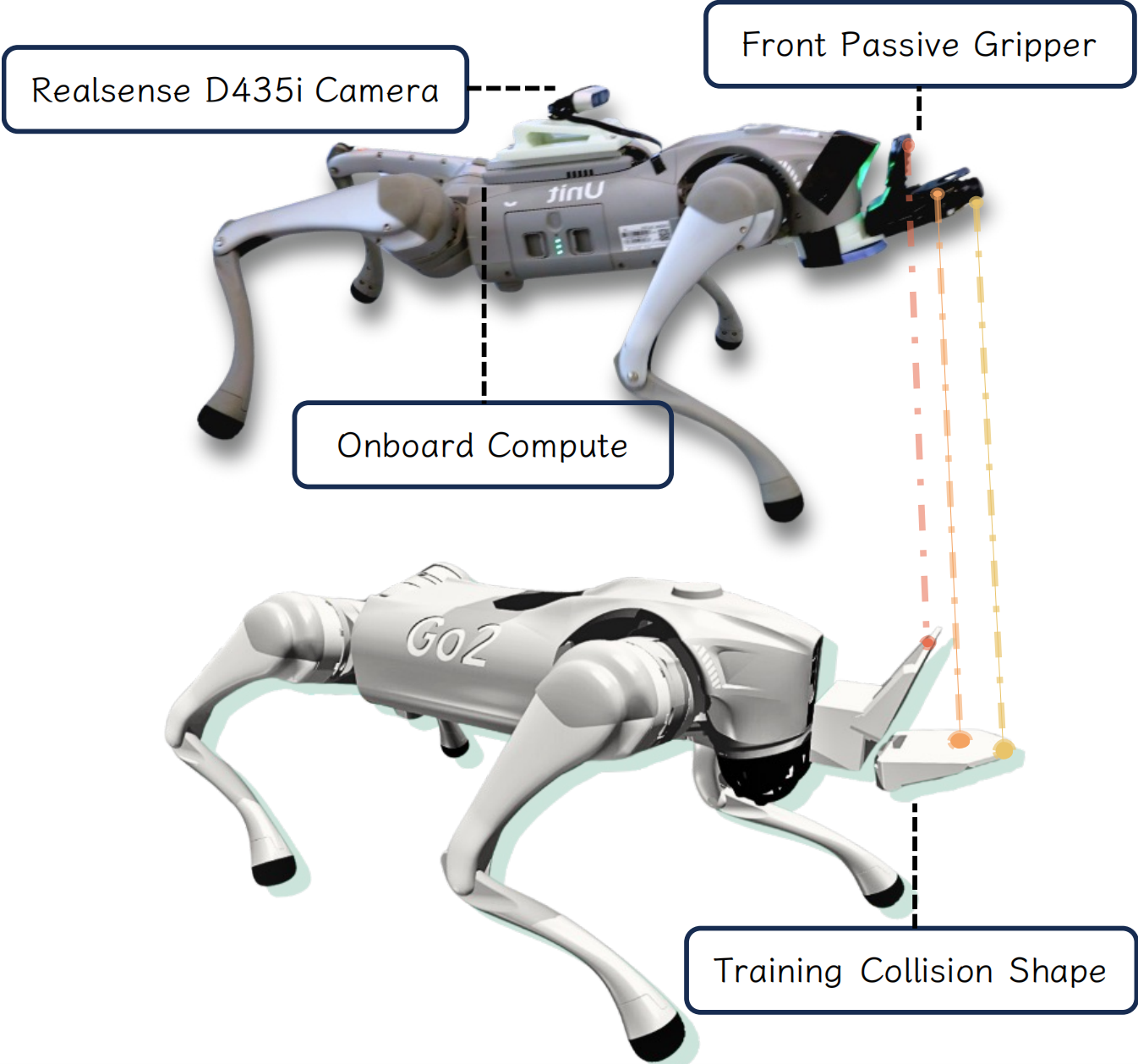
Quadrupedal animals can perform agile and playful tasks while interacting with real-world objects. For instance, a trained dog can track and catch a flying frisbee before it touches the ground, while a cat left alone at home may leap to grasp the door handle. Successfully grasping an object during high-dynamic locomotion requires highly precise perception and control. However, due to hardware limitations, agility and precision are usually a trade-off in robotics problems. In this work, we employ a perception-control decoupled system based on Reinforcement Learning (RL), aiming to explore the level of precision a quadrupedal robot can achieve while interacting with objects during high-dynamic locomotion. Our experiments show that our quadrupedal robot, mounted with a passive gripper in front of the robot's chassis, can perform both tracking and catching tasks similar to a real trained dog. The robot can follow a mid-air ball moving at speeds of up to 3m/s and it can leap and successfully catch a small object hanging above it at a height of 1.05m in simulation and 0.8m in the real world.
We open-sourced our legged robot project, aiming to inspire a series of "xxx DoggBot" creations. Our code and resources are freely available—build upon them to expand this exciting field of robotic locomotion.
This project is supported by Shanghai Qi Zhi Institute and ONR grant N00014-20-1-2675 and has been partially funded by the Shanghai Frontiers Science Center of Human-centered Artificial Intelligence. The experiments of this work were supported by the core facility Platform of Computer Science and Communication, SIST, ShanghaiTech University. Thanks to Qi Wu for the detailed technical support. We thank Zipeng Fu, Xuxin Cheng, Wenhao Yu and Erwin Coumans for the feedback and discussion.
@inproceedings{duan2024playful,
author = {Duan, Xin and Zhuang, Ziwen and Zhao, Hang and Sören Schwertfeger}
title = {Playful DoggyBot: Learning Agile and Precise Quadrupedal Locomotion},
booktitle = {arXiv},
year = {2024},
}